

こんにちは。三信ブログ部のアオノ🌱です。
今回は三信電気取り扱いのコミュニケーションロボットで、受付システムを作ってみました。
とても簡単だったので、ご紹介します。
ロボット紹介
NUWAロボティクス社のKebbi Airを使ってます。
単なるコミュニケーションロボットではなく、教育用途にも使われているため、プログラミングが簡単に出来ます。

今回の受付システム
ロボットに会いたい人の名前を入力、その人の携帯電話に電話をかけて、呼び出します。

Kebbiでの作り方
ロボット側の動作は、NUWA社のウェブプラットフォーム Roflowを使い、簡単にプログラミング出来ます。
以下画像が一連のフローです。
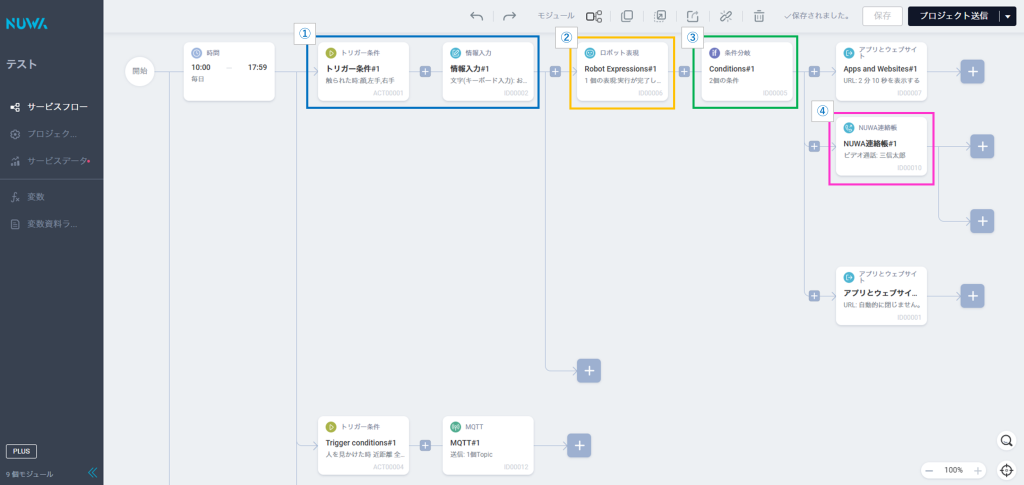
機能ごとに用意されているモジュールと呼ばれるブロックを並べていきます。
① 起動と名前入力
先ずはトリガー条件でを設定し、ロボットの特定部位(ここでは顔、手)を触ると動き出すようにします。
次に情報入力モジュールを使い、名前入力画面を立ち上げます。


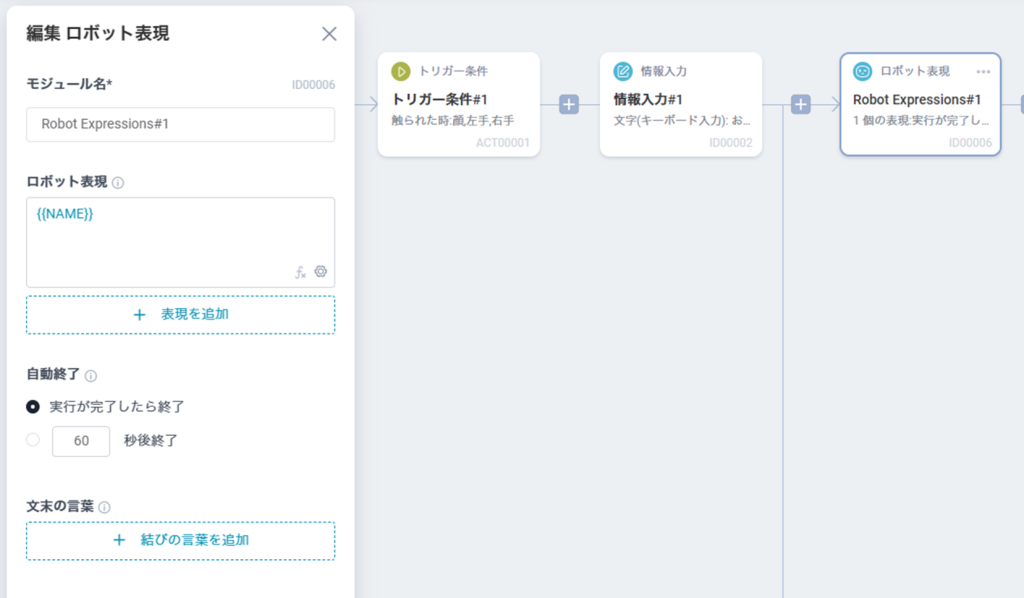
② 入力した名前の読み上げ
間違いないことを確認するため、読み上げ機能を入れました。
ロボット表現を使って、入力された名前を自動でロボットが読み上げます。
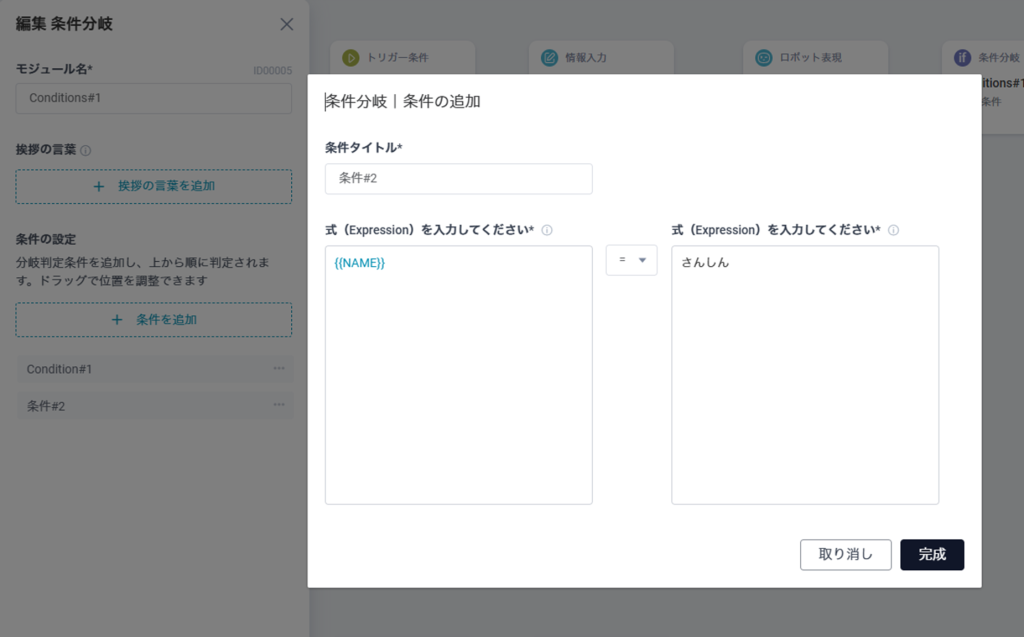
③ 入力された名前の登録を確認
条件分岐モジュールを使い、メンバーリストにある名前かを確認します。
あれば、次の連絡帳モジュールを呼び出します。
④ 電話をかける
連絡帳モジュールを使い、携帯電話に電話します。
連絡先の登録はNUWAウェブサイトと、スマートフォンアプリを使います。

名前入力した相手の携帯電話とビデオ通話できるようになりました。
もちろん、ビデオOFFにして音声だけも可能です。

このように少人数であれば、非常に簡単に受付ロボットを作ることが出来ます。
大人数の登録管理や勤怠システムなどの別システムと連携する場合は、弊社プラットフォームを使っていただくこともできます。
受付ロボットのデモなど、ご要望ありましたら、お気軽にご相談おねがいします😊







